






































آیا حرکت موتور را می توان با میکروسوئیچ محدود کرد؟
میکروسوئیچ و یا همان سنسور یک قطعه الکتریکی است که معمولا کارایی گسترده ای در در سیستم هایی دارند که از الکتروموتور برای جابجائی قطعات و سایر مواد استفاده می کنند. کارایی دیگر این قطعه الکتریکی برای سیستم هایی می باشد که الکتروموتور در آنها بصورت اتوماتیک از حرکت باز می ایستد و متوقف می شود و یا تغییر جهت می دهد. به عبارت دقیق تر می توان گفت موارد استفاده از میکروسوئیچ به موقعیت نصب و نوع سیستم بستگی دارد.
مدار قدرت محدود کردن حرکت با میکروسوئیچ چگونه انجام می گیرد؟

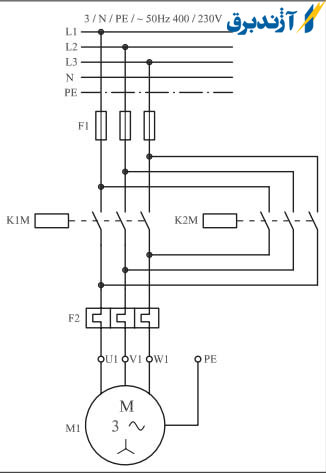
همانطور که در تصویر بالا( تصویر مربوط به موتور چیگرد و راستگرد همراه با موقعیت جا گذاری میکروسوئیچ ها می باشد) مشاهده می کنید مدار محدود کردن حرکت با میکروسوئیچ بدین شکل است که میکروسوئیچ 3 Sدر انتهای مدار 4 S قرار گرفته است و این نحوه قرار گیری باعث می شود که الکتروموتور در ابتدا و انتهای جریان مدار به شکل کاملا اتوماتیک و خودکار متوقف شود
مدار فرمان محدود کردن حرکت موتور با میکروسوئیچ

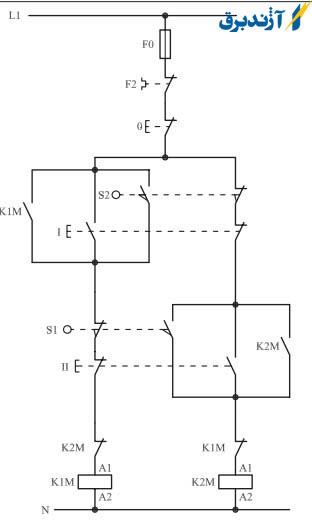
برای صادر شدن فرمان محدود کردن حرکت موتور، با فشرده شدن دکمه استارت موتور به صورت خودکار به حالت چپگرد و یا راستگرد از مدار فرمان و مدار قدرت قرار می گیرد. نحوه طراحی مدار به صورتی است که یک کنتاکتور کمکی به عنوان حافظه در مدار فرمان چپگرد و راستگرد خودکار ساخته شده است. تنها کافی است که دکمهs1 موتور فشرده شود تا مدار به حالت راستگرد تغییر جهت دهد و در انتهای مسیر مدار با برخورد کردن به میکروسوئیچ S3، کنتاکتور K1M قطع شود و به دنبال آن کنتاکتور K2M وصل گردد و در نتیجه موتور در جهت چپگرد راه اندازی خواهد شد.
در ابتدای جریان مسیر به محض برخورد به میکروسوئیچ S4، کنتاکتور K2M قطع می گردد و به جای آن کنتاکتور K1M وصل خواهد شد. این روند جریان تا زمان فشرده شدن استپ S0 و قطع K1 ادامه خواهد یافت. براى ممانعت از ایجاد همزمانى دو كنتاكتور K1M و K2M در ابتدای كار، اگر هر كدام از شستی های I یا IIزودتر وصل گردند تیغۀ بسته آن كنتاكتور كه در مسیر مخالف قرار گرفته است، باز خواهد شد مانع از این امر می شود که كنتاكتور دوم وصل گردد
تغییر جهت اتوماتیک در مدار قدرت
